Velocidade Angular Para Linear

A relação entre velocidade angular para linear é essencial para entender como sistemas de movimento rotativo se convertem em trajetórias retas no dia a dia.
O que é velocidade angular e como ela se relaciona com a linear
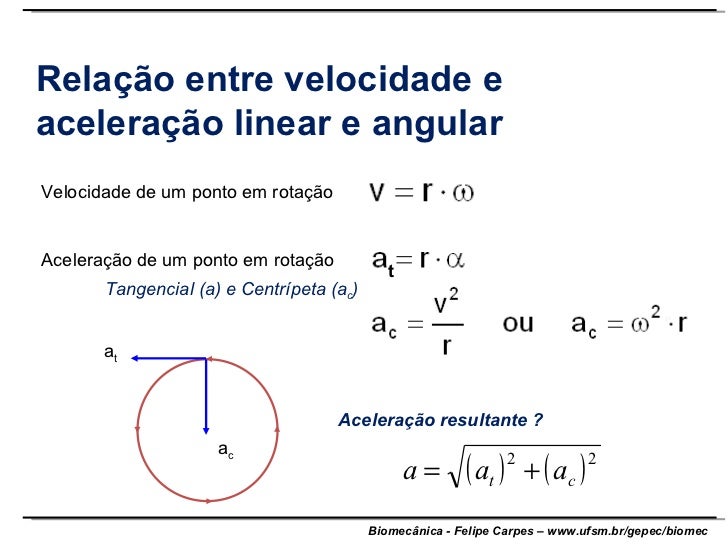
A velocidade angular é a taxa de variação do ângulo em relação ao tempo, geralmente medida em radianos por segundo, e descreve quão rapidamente um corpo ou ponto gira em torno de um eixo. Já a velocidade linear mede a taxa de mudança da posição ao longo de uma trajetória reta, expressa em metros por segundo ou unidades similares. A conexão entre velocidade angular para linear surge justamente quando um movimento de rotação é transformado em movimento de translação, como em engrenagens, rodas, discos e outros sistemas mecânicos.
Para converter a velocidade angular em velocidade linear, utilizamos a fórmulava = ω × r, onde va representa a velocidade linear, ω (omega) é a velocidade angular e r é o raio ou a distância ao eixo de rotação. Essa equação mostra que, para um raio fixo, aumentar a velocidade angular aumenta proporcionalmente a velocidade linear, o que é crucial em projetos de engenharia, automação e física aplicada.
Importância da conversão angular para linear em projetos mecânicos
Em projetos mecânicos, a capacidade de traduzir velocidade angular para linear permite dimensionar componentes como eixos, correias, engrenagens e rolos de forma precisa. Saber quanto um ponto na periferia de uma roda avança linearmente a cada radiano de rotação ajuda a calibrar sistemas de transmissão, controle de velocidade e precisão posicional em máquinas industriais e veículos.
Além disso, sensores de velocidade e sistemas de feedback muitas vezes fornecem dados de velocidade angular, e é necessário fazer a conversão para velocidade linear para comparar com requisitos de projeto ou normas de desempenho. Portanto, dominar a relação entre velocidade angular para linear é um diferencial para engenheiros, técnicos e estudantes que buscam eficiência e confiabilidade em sistemas móveis.
Aplicações práticas no cotidiano e na indústria
No cotidiano, exemplos de conversão de velocidade angular para linear aparecem em bicicletas, carros, ventiladores e máquinas de lavar. A rotação das rodas, por exemplo, gera um avanço linear que nos move no espaço, e calcular essa relação ajuda a ajustar transmissões, freios e sistemas de suspensão. Na indústria, este princípio é aplicado em esteiras, esteiras rolantes, sistemas de transporte e máquinas de processamento, onde a sincronização entre rotação e avanço linear é vital para a produtividade.

Na robótica e automação, a velocidade angular para linear é usada para programar trajetórias precisas de braços robóticos, especialmente em aplicações de soldagem, montagem e pintura. O controle preciso dessa conversão garante repetibilidade, segurança e qualidade nos processos, demonstrando como conceitos teóricos se tornam soluções práticas e mensuráveis no chão de fábrica.
Cálculo prático e equações fundamentais
Para calcular a velocidade linear a partir da velocidade angular, aplicamos a fórmula v = ω × r, devendo atentar às unidades de medida para evitar erros de escala. Se ω estiver em radianos por segundo e r em metros, a velocidade linear v será obtida em metros por segundo. Em casos reais, é comum trabalhar com rpm (rotações por minuto), exigindo a conversão para radianos por segundo antes de aplicar a fórmula.
Além disso, a aceleração linear pode ser obtida a partir da aceleração angular pela mesma relação, considerando raio constante. Isso é importante em situações de variáveis dinâmicas, como partida e frenagem de máquinas. Manter coerência nas equações e validar os resultados com testes práticos ajuda a refinar projetos e a evitar perdas de eficiência por cálculos incorretos de velocidade angular para linear.

Desafios comuns e boas práticas na conversão
Um dos desafios ao trabalhar com velocidade angular para linear é garantir que o raio utilizado na conversão seja o adequado à geometria do sistema, pois partes de máquinas podem ter múltiplos raios efetivos dependendo do ponto de medição. Além disso, atritos, folgas e deformações podem introduzir perdas que não são captadas apenas pela equação teórica, exigindo ajustes baseados em dados experimentais.
Para minimizar erros, recomenda-se sempre validar a conversão de velocidade angular para linear com medições reais, usar sensores adequados e considerar fatores como inércia e aceleração variável. Documentar os parâmetros de raio, faixas de operação e tolerâncias permite replicar resultados e otimizar projetos futuros, tornando o processo de conversão mais previsível e confiável.
Considerações finais e evolução dos conceitos
Entender a velocidade angular para linear não é apenas resolver uma fórmula, mas compreender como movimentos rotativos se transformam em deslocamentos lineares em sistemas reais. Com o avanço da automação e da robótica, essa conversão torna-se ainda mais relevante, pois sistemas complexos dependem de cálculos precisos para sincronizar ações, reduzir desperdícios e melhorar a eficiência energética.

À medida que tecnologias evoluem, métricas de desempenho, simulações digitais e sensores avançados permitem modelar a relação entre velocidade angular para linear com alta precisão. Manter-se atualizado sobre boas práticas, ferramentas de cálculo e aplicações inovadoras ajuda a dominar esse conceito chave, abrindo portas para soluções mais rápidas, seguras e inteligentes em diversas áreas da engenharia e da física aplicada.
QUAL A DIFERENÇA ENTRE VELOCIDADE LINEAR E ANGULAR? EM 2 MINUTOS: DICA RÁPIDA PARA O ENEM
Velocidade linear e angular, qual a diferença entre elas? Nesta aula veremos suas diferenças e também suas respectivas ...
